This Website is not fully compatible with Internet Explorer.
For a more complete and secure browsing experience please consider using Microsoft Edge, Firefox, or Chrome
Crashworthiness is an area where numerical simulation can be leveraged due to the complexity of testing and measurements. Properly correlated, a numerical model can provide a huge quantity of information as numerical sensors are almost only limited by the degree of refinement of the finite element model. Moreover, such a model can be a powerful development tool, putting in perspective the complexity and expensiveness of conducing multiple physical crash test in a development process and the easiness of iterating with a Finite Element Model once it has been properly setup.
Crashworthiness has its own specific needs in terms of simulations. Over the last decades, specific modelling features, tools and techniques have been developed in the different software packages to allow the Numerical outcome to easily match the outcome of physical impact test. More specifically, simplified and detailed models of Anthropomorphic Test Devices (ATDs, or more commonly named Crash Test Dummies), airbag models, seat belts specialized elements or acceleration switch sensors are just a few examples of what commercial packages include to facilitate the analysis and the parallels with physical testing.
Crashworthiness & explicit solution scheme
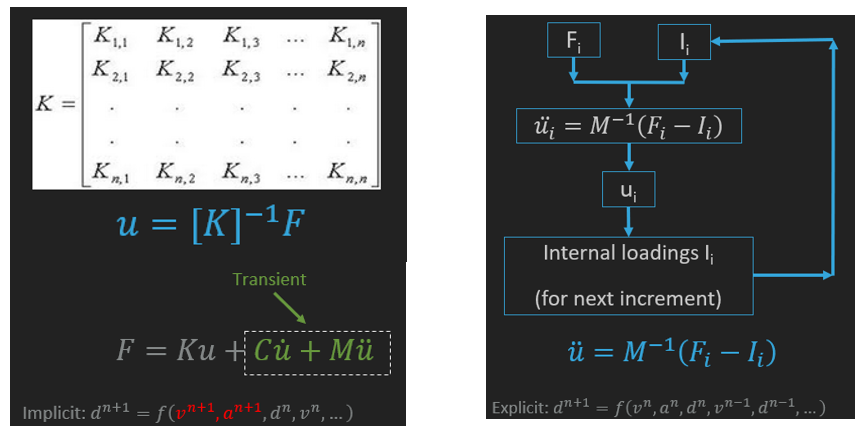
By nature, crashworthiness simulation involves highly non-linear transient events and is all indicated for an explicit finite element solution (The difference between implicit & explicit is treated in more detail within WT05 What is Implicit and Explicit Finite Element Simulation). High level of deformation is expected, contacts are crucial, material failure needs to be monitored throughout the simulation and typical events of interest are short in time. All these aspects make the use of explicit solution mathematically more appropriate. Moreover, because of the equilibrium and convergence criteria needed in the transient implicit solution and because of the mathematical local independence of the elements within the explicit solution; this later seems to be more agile to deal with crashworthiness dynamics.
Conceptual representation of differences between implicit and explicit solution schemes
Non-Linearities
One of the key aspects of the explicit simulation for the simulation of crash is the capacity to easily handle high non-linearities. While Non-linear implicit transient solution allows an update of the stiffness matrix (the base element Hook’s law and implicit solution are based on), it hardly allows a change of shape of this matrix or the truncation of some elements. On the other hand, the explicit transient solution is built around Newton’s second law, around the mass matrix, which is purely diagonal and involves, let say, a form of local independence of the physics at each node. Therefore, extreme changes in shape, stiffness and connections are more easily dealt with. Also, mathematics behind the explicit solution makes it easy to implement complex material behaviour.
High Deformation & Material Failure
It is not unusual in crashworthiness simulation to deal with highly deformed structures and material failure. The mathematical conditioning of explicit solution makes the solution more tolerant to drastic changes in structure configuration. Accordingly, a lot of features have been developed in commercial codes to allow the representation of a full crash event. To allow post-failure representativeness of the simulation, different failure mechanisms and mesh adaptation such as element erosion, allowing material separation to occur in the simulation, are possible. Coupled with the element erosion, adaptive remeshing allows the material failure and its outcome to be less dependant of the initial finite element mesh. Failure of bulk material, but also failure of mechanical joints, such as bolts, rivets and welds are then able to be included in the analysis.
Also because of mathematical conditioning of explicit solution, implementation of different material behaviour and features such as strain rate dependencies are possible. Strain rate dependency of material properties has proven to be critical in crashworthiness simulation and injury prediction.
Typical Duration and time resolution
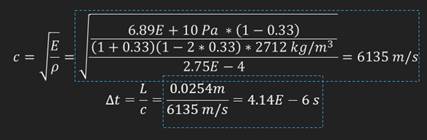
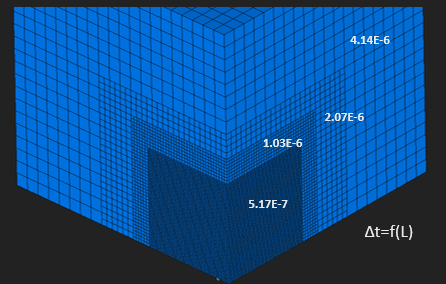
The event of interest in crashworthiness simulation is typically counted in milliseconds and requires a fine time resolution: a short time step; to be able to capture the rapid dynamics at play. As it as been said before, simulation gives access to a large number of numerical sensors, which are meant to either be correlated with their physical counterpart, be used to trigger some safety mechanism such as seat belt retractor or air bags, or be used to compute injury criteria such as in ATDs. Conveniently, explicit simulation, by nature, requires a small time increment for stability consideration (This is treated in more details in the previous section where the stable time increment is discussed). Conceptually, the element size within the structural mesh and the simulation time increment should be coherent to allow a shock wave to be followed from one element to another without disappearing (because of an element to small or a time increment too large). Therefore, global mesh size and material stiffness often drive the time increment (an analyst might rightfully say that it is the other way around…).
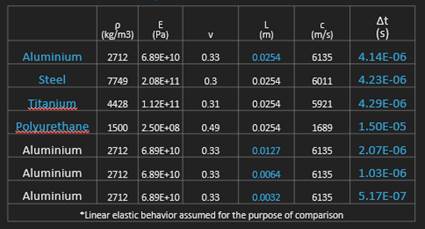
Wave speed in material and examples of order of magnitude
A compromise to allow efficient computational time might be needed or isolated elements might lead to excessively low time increment; for that purpose, time increment can be cautiously controlled by mass and stiffness scaling.
Injury prediction
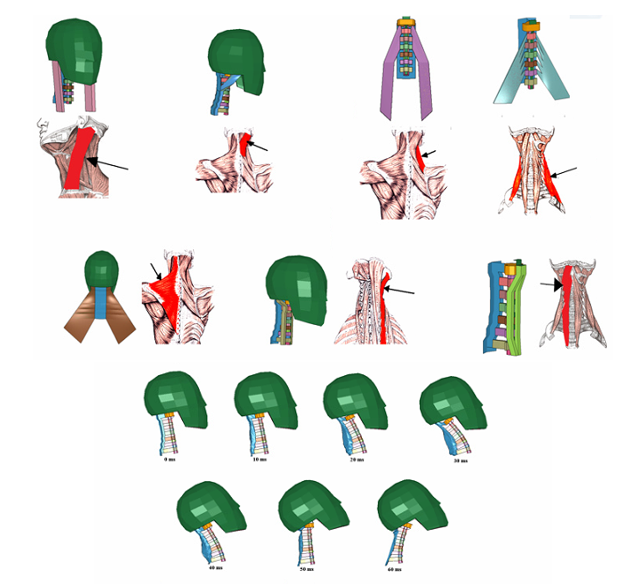
Crashworthiness simulation gives access to two types of injury criteria and rises an interesting dilemma. First, considering that a strong analysis process relies on a solid physical testing correlation; a lot of effort has been put to reproduce with fidelity the structures and sensors of ATDs such as Hybrid III instrumented mannequins with amazing results. This strategy allows a 1:1 correlation with physical testing and equivalent (physical testing vs simulation) injury criteria based on segment kinematics and kinetics. Such as for physical testing, numerical simulation signals need to be filtered numerically to get rid of numerical artefacts and to allow injury criteria to be equivalent. The second strategy consist in bypassing the physical model which is the ATD and represent directly the biological structures, such as muscles, tendons, ligaments… Direct correlation of injury with any kind of physical testing becomes much harder, however it might give insights, otherwise impossible to get, about injury mechanisms.
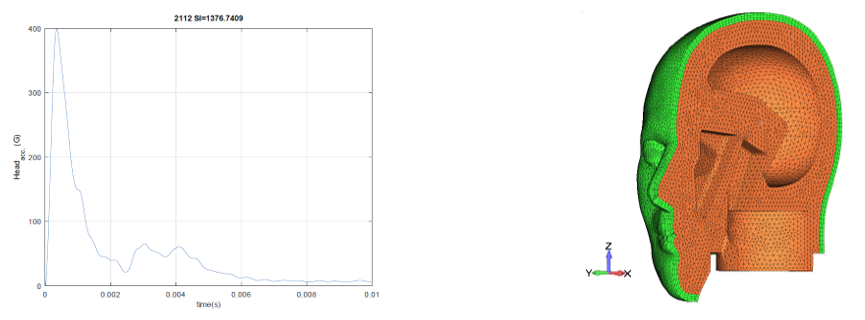
Most injury criterion such as the HIC or the SI rely on segment (head) kinematics (acceleration)
Numerical Simulation allows the use of more bio-fidelic injury criteria